
2020年7月9日
ノートPCの発熱を抑える方法 - その2
目次: Windows
前回(2020年6月29日の日記参照)、ノートPCの発熱を抑えるためにCPUのクロック上限を抑える設定をしました。
前回はTurboBoostだけ無効化する方法がわかりませんでしたが、ググっていたら割と簡単にTurboBoostを無効化できることがわかりました。
レジストリエディタで、
HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\Power\PowerSettings\54533251-82be-4824-96c1-47b60b740d00\be337238-0d82-4146-a960-4f3749d470c7
のAttributesというDWORD値を1から0 or 2に変更します(※)。
すると下記の「プロセッサ パフォーマンスの向上モード」オプションが出現しますので、無効を選択します。
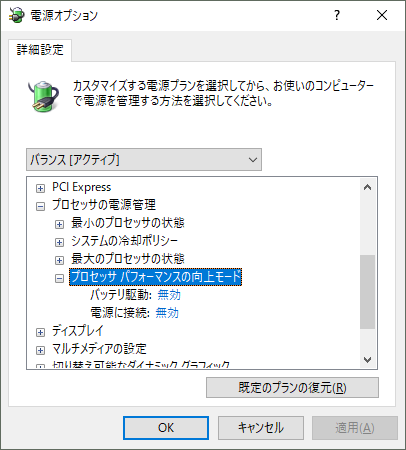
TurboBoostを無効化すると、最大のプロセッサの状態を100% にしても、ベース周波数の1.6GHzまでしか周波数が上がらなくなります。これは良い感じだ。
- 〜54%: 0.90GHz
- 〜60%: 0.99GHz
- 〜65%: 1.10GHz
- 〜71%: 1.19GHz
- 〜76%: 1.30GHz
- 〜82%: 1.39GHz
- 〜87%: 1.49GHz
- 〜100%: 3.36GHz → 1.59GHz
(※)私はSurface ProでCPUクロックが最大に張り付くという問題(フォーラムへのリンク)の解決策に載っていたものを見つけたのですが、どうも昔のWindows 8で消えた設定らしい(ASCII.jp : Windows 8.1で消えた詳細な電源管理項目を表示する!より)です。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2020年7月10日
MAD Tower Tycoon楽しい
目次: ゲーム
最近Steamで買った、MAD Tower Tycoon(開発: Eggcode)で遊んでいます。
ビル建築&経営シミュレーションゲームです。プレイヤーはビルを拡張していって、テナントや住居を作ります。テナントには住人やゲストが押し寄せてきますので、住人のストレスを溜めないように、メンテナンス施設を足したり、階段、エスカレーター、エレベーターでうまく捌き、儲けを出して、ビルをさらに拡張させるというゲームです。
The Towerの後継者?
ビル建築&経営シミュレーションの名作はThe Tower(開発: OPeNBooK)だと思います。The Towerは続編が出なくなって久しく寂しかったですが、MAD Tower TycoonはかなりThe Towerに近い作りです。
後追いだけあって基本的にThe Towerより良くなっていますが、残念な部分もあって、
- 上階に伸ばすときの建設が面倒くさい
- 中盤から金が余りまくる
- オフィス、住宅からの変な苦情(人通りが多い)
- 横移動のストレスがない、もしくは非常に低い
- エレベーターは速いが、自由度が低い
難易度は最近の風潮で優しめだとしても、最後のエレベーターの劣化は残念です。
エレベーターの変な仕様
エレベーターはThe Towerのキモで、説明書でも詳しく説明していました。MAD Tower Tycoonのエレベーターの場合は、
- エレベータのカゴ数が最大3で少ない
- 通過階の設定ができない(降車専用ならある)
特に後者の制限が厳しくて、ゾーン方式(※)エレベーターが実質建設不可能で、高層ビルを作るには厳しい仕様となっています。
(※)エレベーターを複数基用意して、1つ目は1〜5階のみ、2つ目は5〜10階のみなど、一部の階しか止まらないエレベーターを作る方式のことです。現実でも高層ビルでよく見かけます。
むりやりゾーン方式エレベーターを作るとどうなる?
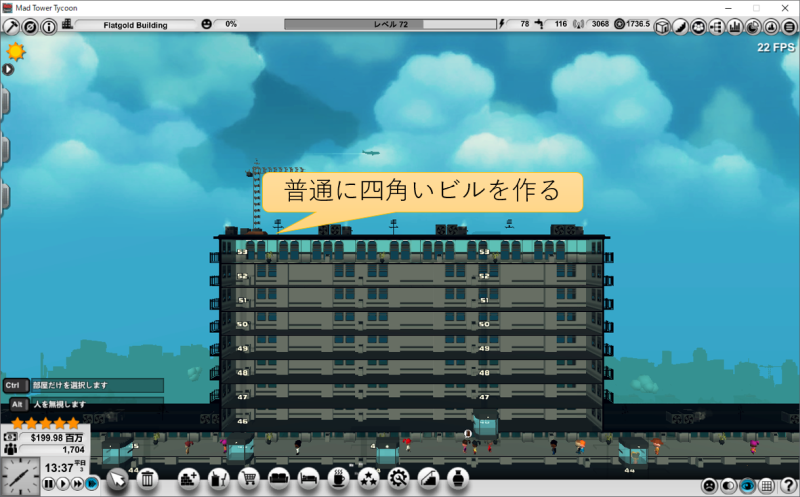
バグなのか仕様なのかわからないですが、MAD Tower Tycoonではバルコニーでフロアをぶち抜いて、スカイブリッジを作ると、どことも繋がらない孤立したフロアを作れます。
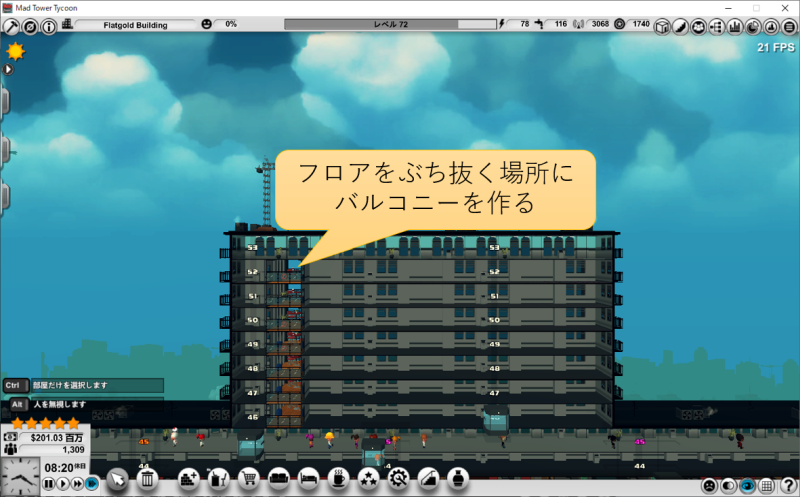
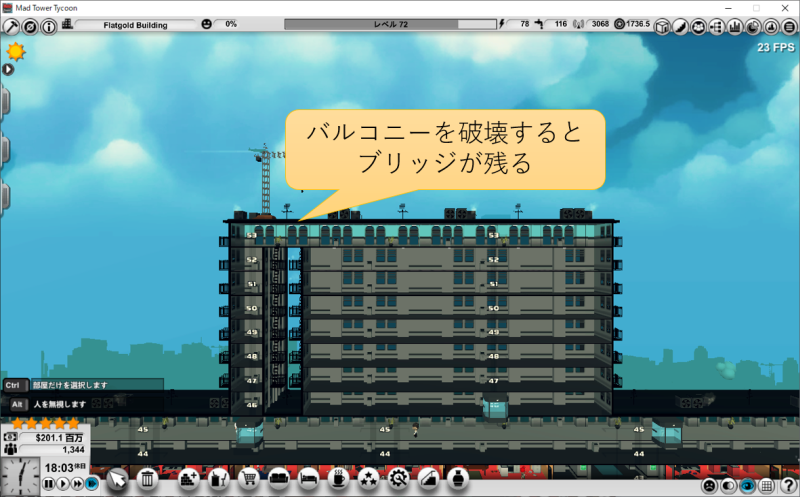
孤立したフロアにエレベーターだけを設置することで、実質的に乗車降車禁止階にできます。

ところがこの乗車降車禁止エレベータを作っても、なぜか住人は一切利用してくれません。訳が分かりません。どうしたら良いんでしょうか??
オープンブックの紆余曲折
The Tower開発元のOPeNBooKは合併と名前変更を繰り返しています。合併相手は9003, incで、AQUAZONEという熱帯魚育成&水槽シミュレーションで名を馳せたベンダーです。
1993 2000
OPeNBooK ---, 1996 ,--> オープンブック(The Towerの版権を持つ)
+--> オープンブック9003 ---+--> シノミクス
9003, inc ---'
1990
Wikipediaを見るとこんな経歴でした。お互い、元の鞘に収まったという感じがします。合併したけどやることがなかったんですかね?
コメント一覧
- わしださん(2020/08/10 22:40)
オープンブック9003時代に鳥(Pinna?)飼ってました・・・熱帯魚はともかくなぜ鳥飼育ゲーを買ったのか、今となっては心境が分かりません・・・。 - すずきさん(2020/08/11 18:59)
鳥のゲームは知りませんでした。色々やってるなあ。オープンブック……。
あの頃は、PCの解像度がどんどん上がって綺麗になっていて、飼育ゲームとかアクアリウム的な、眺めるタイプの奴が流行ってましたよね。
この記事にコメントする
2020年7月11日
STATIONflow実績コンプリート
目次: ゲーム
STATIONflowの実績をコンプリートしました。「ラッキーセブン」と「東京」は自動化マクロを組まないと取れませんでした。

本来、このゲームにハマって色々なマップをずっと遊んでいたらいつのまにか取れていた、というタイプの実績ですが、申し訳ないことに、私はそこまでの情熱がなかったです。
ゲームやったらわかりますけど、この2つの実績だけ条件設定が異常すぎます。
- 1日の利用者数は最大17,000人程度(全出入口&乗り場が最大レベルの駅)
- 1390万人達成には単純計算でゲーム内時間800日程度
- STATIONflowの1日は最速でも15分、普通に遊ぶと30分〜1時間くらい
- 最速でも200時間は必要
実績の条件(総利用者数700万人、1,390万人)がいかに異常かがわかると思います。
自動化
自動化の方法は簡単で、PowerShellでEnterキーを3秒に1回送るマクロを組んで、会社行っている間や夜間に放置するだけです。2週間くらいで取れました。
STATIONflowは放置しても悪いイベントが起きない(=駅が壊れない)優しい仕様になっているため、自動化+放置が可能でしたが、他のシミュレーションゲームだと偶発的に悪いイベントが起きるため、この方法は使えません。
まあ、明らかに製作者の想定した取り方ではないし、こんな方法で実績取っても嬉しくないし、無理に実績取るのは今後はやめておきます。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年7月12日
MAD Tower Tycoonコンプリート
目次: ゲーム
MAD Tower Tycoonでゾーン方式のエレベータの作り方を悩んで色々やっていたら、いつのまにかレベル100、実績コンプリートしていました。ゲーム内時間は表示されないので詳しくはわかりませんが、おそらく700日くらい?
The Towerと比べて色々思うところはありますが、総合的にみれば面白いと思います。
序盤だけ金欠になりやすいですが、難易度はかなり低めですし、ビル建築シミュレーション初めての方にオススメしたいゲームです。
高層ビルを作りたい
MAD Tower Tycoonは住人を追尾する機能があり、ビルの住人が困っていないか把握するのに便利です。基本的には目的地に行って、家に帰る(住人の場合)、もしくはビルから出る(ゲストの場合)だけですけど、大きなビルを作ると変な行動が目立ちます。
- ビルの端から端まで歩いて、わざわざ遠いエレベーターで乗り換え
- 近所のレストランを無視して、わざわざ遠いレストランに行く
前回(2020年7月10日の日記参照)も書きましたが、MAD Tower Tycoonはゾーン方式のエレベーターを作る方法がわかりません。今はメンテナンス施設の射程(上下6Fに効果がある)の関係で、7階+8階(※)おきに乗り換え階を作っています。
どうもこの方式だと40階くらいで限界っぽいです。乗り換えに時間が掛かりすぎて、目的地に行くだけで半日費やしている気の毒な住民がいます。彼らはなぜか不満は言いませんが、見ていると不憫です……。
救いとしてはMAD Tower Tycoonはビルの横幅がめちゃくちゃ広く取れるので、45階もあれば、レベル100、五つ星ビルが余裕で作れることです。だけど、やっぱりThe Towerにあやかるなら、100階建て目指したいですよね?
(※)効率重視ならば7F, 14F乗り換えが最適ですが、スカイロビーを作成できるのは15Fからなので、あえて14Fを空きフロアにして、15F乗り換えにしています。
どうしてもThe Towerと比較してしまう
MAD Tower Tycoonは、The Towerとかなり似ているがゆえに、つい比較してしまいます。
良いところ
- エレベータ乗り換えがロビー階以外でも可能
- 何度でも乗り継げる(1F → 7F → 15F → 23Fのような乗り継ぎが可能)
- かなり上の階でも階段で行ける(The Towerは確か4Fくらいしか上らない)
悪いところ
- エレベータの通過階設定ができない(今、一番困っている制限)※通過階設定はできるが設定が効かないバグ、とのこと(2023/10/20追記)
- 一度上に行ってから、下に行く乗り換えが不可能(1F → 15F → 7Fみたいな乗り換えはしないようだ)
ゾーン方式のエレベーターが作れたら、高層ビルに効率的に人を運べるようになって、もっと面白くなるはずなのに。もったいないよ〜。
コメント一覧
- わしださん(2020/08/10 22:36)
The Tower懐かしいですね。
話題とずれる荒しみたいなコメントになりますが、旧姓でエゴサーチして最も古い自分の名前が出るのが、Geocitiesの他人のサイトに投稿したThe towerのビルでした。小6くらいだったのですが、本名とビル名に「第百ビル」とか付けてて。
その10年以上後、新卒で会社入って最初の移動先の課長に「第百ビルの人?」って聞かれてびびりました。(会社入って一年くらいは旧姓だったので)
いまはGeocitiesも閉鎖になったので出てきませんが、いい思い出ではあります。
ということでとにもかくにも100階建てにしてチャペル建てたくなる気持ちを思い出しました。 - すずきさん(2020/08/11 18:59)
小学生でサイトに投稿はスゴイです。そして会社バレしてるのも奇遇というかなんというか。
The Tower で遊んでいたのは、たしか中学生時代だったと思いますが、当時インターネットとかパソコン通信はさっぱりわからず、ビルを投稿しようという考えが全くなかったです。
Mad Tower Tycoon も 100階にチャペルを建てられますが、The Tower ほどの重要なポジションではない(集客施設の一つに過ぎない)です。星 3〜4辺りからゲーム性が極端に下がってダレてしまうのも、ちょっと残念なポイントです。 - 通り縋りさん(2023/10/18 19:08)
上の記事2023年9月編集という事ですが間違ってます。
2023年10月現在、正しくは「エレベーターの通過階設定自体は出来るが正確に反映されない」です。
通過階設定自体は出来る事を確認してますが、特に高速エレベーターに於いて設定が正常に反映されず「通過階にも待ちが発生し停車してしまう」というバグとなっています。 - すずきさん(2023/10/19 11:17)
ご指摘ありがとうございます。9月の編集は先頭にリンクを加えただけで、内容は2020年7月に書いたときのままです。わかりにくくてすみません。
それは良いとして、ご指摘の内容に合わせて修正しておきます。
この記事にコメントする
2020年7月13日
STATIONflow - まとめリンク
目次: ゲームに統合。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年7月14日
OpenCLとICD
目次: OpenCL
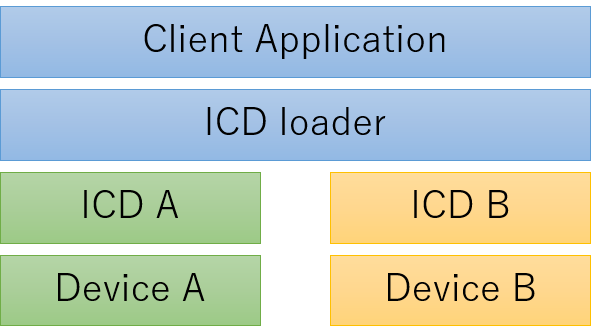
OpenCLは複数のベンダーのデバイスを同時に扱うことができます。ICD(Installable Client Driver)というそうです。ICDはGPUなどのデバイスを制御し、アプリケーションとICDの間にICDローダーが存在します。
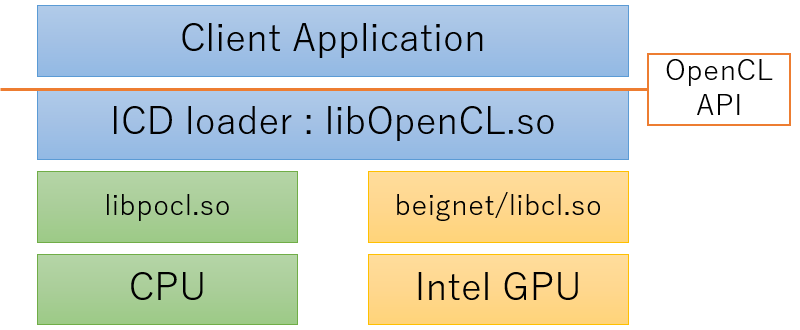
Debian TestingではICDローダーとしてocl-icd-2.2.12が使われています。
Debian TestingのICD loader
$ apt-cache search ocl-icd-libopencl1 ocl-icd-libopencl1 - Generic OpenCL ICD Loader
ローダーのソースコードはGitHub(リンク)にあります。
先程、図示したもの以外にもICDはいくつか実装があります。現時点のDebian Testingでは下記が提供されていました。
- pocl-opencl-icd: 主にCPU向け
- beignet-opencl-icd: 比較的古いIntel GPU向け
- intel-opencl-icd: 比較的新しいIntel GPU向け、Testingにしか存在しない
- mesa-opencl-icd: AMD GPU向け
- nvidia-opencl-icd: nVidia GPU向け、ソースコードは公開されていない
IntelはICDのソースコードを完全にオープンにしています。NVIDIAは公開していません。AMDもないのかな?
ICDのロード手順
動作を追ってみたいと思います。アプリケーションにはclinfoを使います。ocl-icdは環境変数OCL_ICD_DEBUG=15に設定すると、動作時に詳細なログを出力します。デバッガで追うのと併用するとわかりやすいです。
- clinfo: clGetPlatformIDs() を呼ぶ
- ocl-icd: _initClIcd() -> _initClIcd_real() -> __initClIcd()
- ocl-icd: _find_num_icds(): /etc/OpenCL/vendorsの *.icdファイルを見る(*.soへのパスが書いてある)
- ocl-icd: _load_icd(): *.soをdlopen()
- ocl-icd: _find_and_check_platforms(): 後述
ローダーが走査するディレクトリは /etc/OpenCL/vendorsがハードコードされていますが、環境変数OPENCL_VENDOR_PATHで変更できます。
ICDのロードの中心となる処理は _find_and_check_platforms() です。
- dlsym() でclGetExtensionFunctionAddress() のアドレスを得る
- clGetExtensionFunctionAddress() でclIcdGetPlatformIDsKHR() のアドレスを得る
- clGetExtensionFunctionAddress() でclGetPlatformInfo() のアドレスを得る
- clIcdGetPlatformIDsKHR() でプラットフォーム数とプラットフォームの情報を得る
プラットフォームは説明が難しいですが、OpenCL APIの実体+任意のドライバ固有のデータとでも言いましょうか。変数の型はcl_platform_id * 型です。cl_platform_idは少なくとも先頭のメンバはstruct _cl_icd_dispatch *dispatchでなければなりません。dispatchの後ろには他の情報が入っていても問題ないようです。
cl_platform_idとdispatch
// ocl-icd/ocl_icd_loader.c
static inline void _find_and_check_platforms(cl_uint num_icds) {
cl_uint i;
...
cl_platform_id *platforms = (cl_platform_id *) malloc( sizeof(cl_platform_id) * num_platforms);
error = (*plt_fn_ptr)(num_platforms, platforms, NULL);
...
for(j=0; j<num_platforms; j++) {
debug(D_LOG, "Checking platform %i", j);
struct platform_icd *p=&_picds[_num_picds];
char *param_value=NULL;
p->extension_suffix=NULL;
p->vicd=&_icds[i];
p->pid=platforms[j]; //★★pid = platform IDのことらしい
/* If clGetPlatformInfo is not exported and we are here, it
* means that OCL_ICD_ASSUME_ICD_EXTENSION. Si we try to take it
* from the dispatch * table. If that fails too, we have to
* bail.
*/
if (plt_info_ptr == NULL) {
plt_info_ptr = p->pid->dispatch->clGetPlatformInfo; //★★dispatchメンバが存在することを前提としている
// ocl-icd/khronos-headers/CL/cl.h
typedef struct _cl_platform_id * cl_platform_id;
// ocl-icd/(build-dir)/ocl_icd_loader_gen.h
struct _cl_platform_id { struct _cl_icd_dispatch *dispatch; }; //★★dispatch以外は特に規定がなさそう
// ocl-icd/(build-dir)/ocl_icd.h
struct _cl_icd_dispatch {
#ifdef CL_VERSION_1_0
CL_API_ENTRY cl_int (CL_API_CALL*clGetPlatformIDs)(
cl_uint /* num_entries */,
cl_platform_id * /* platforms */,
cl_uint * /* num_platforms */
) CL_API_SUFFIX__VERSION_1_0;
#else
CL_API_ENTRY cl_int (CL_API_CALL* clUnknown0)(void);
#endif
#ifdef CL_VERSION_1_0
CL_API_ENTRY cl_int (CL_API_CALL*
clGetPlatformInfo)(
cl_platform_id /* platform */,
cl_platform_info /* param_name */,
size_t /* param_value_size */,
void * /* param_value */,
size_t * /* param_value_size_ret */
) CL_API_SUFFIX__VERSION_1_0;
#else
CL_API_ENTRY cl_int (CL_API_CALL* clUnknown1)(void);
#endif
...
//★★こんな調子で関数ポインタの定義が延々と続く
先頭のdispatchはたくさんの関数ポインタが並んだ巨大な構造体です。アプリケーションから見るとOpenCLのAPIはocl-icdが提供しているように見えますが、ocl-icdのAPI実装はdispatchの関数ポインタを呼ぶラッパー関数であり、関数ポインタと、OpenCL API実装の本体を提供するのは各ICDの役割です。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年7月15日
GCCを調べる - その16 - 自動ベクトル化を有効にする
目次: GCC
GCCには自動ベクトル化(tree-vectorize)機能があります。ループ処理を自動的にSIMD命令に置き換えるために使われているようです。現状のGCCが可変長のベクトル長に対応しているかどうかはわかりません。未対応ならば可変長のベクトル長に対応する実装が必要になりますが、非常に難しそうです。
可変長のベクトルの扱いはひとまず横に置くとして、RISC-Vのベクトルを「とても長い固定長のSIMD」とみなして自動ベクトル化を動かします。
自動ベクトル化を有効にするコード
// gcc/config/riscv/riscv.c
/* Implement TARGET_VECTORIZE_AUTOVECTORIZE_VECTOR_MODES. */
static unsigned int
riscv_autovectorize_vector_modes (vector_modes *modes, bool)
{
if (TARGET_VECTOR)
{
modes->safe_push (V64SImode);
modes->safe_push (V32SImode);
}
return 0;
}
...
#undef TARGET_VECTORIZE_AUTOVECTORIZE_VECTOR_MODES
#define TARGET_VECTORIZE_AUTOVECTORIZE_VECTOR_MODES riscv_autovectorize_vector_modes
自動ベクトル化を有効にする方法は簡単で、これだけです。
テスト用のint配列をコピーする関数
void *cpy(void *dst, const void *src, int n)
{
int *d = dst;
const int *s = src;
int i;
for (i = 0; i < n / sizeof(*d); i++) {
d[i] = s[i];
}
return dst;
}
この関数がベクトル化あり、なしでどのように変わるか見ます。
自動ベクトル化の結果
//★★自動ベクトル化、あり
d[i] = s[i];
100b8: 1202e007 vlw.v v0,(t0)
100bc: 10038393 addi t2,t2,256
100c0: f0038793 addi a5,t2,-256
100c4: 10028293 addi t0,t0,256
100c8: 0207e027 vsw.v v0,(a5)
for (i = 0; i < n / sizeof(*d); i++) {
100cc: fee296e3 bne t0,a4,100b8 <cpy+0x44>
100d0: 00661293 slli t0,a2,0x6
100d4: 02568963 beq a3,t0,10106 <cpy+0x92>
100d8: 959a add a1,a1,t1
100da: 932a add t1,t1,a0
d[i] = s[i];
100dc: 0005a383 lw t2,0(a1)
//★★自動ベクトル化、なし
d[i] = s[i];
10080: 0005a303 lw t1,0(a1)
for (i = 0; i < n / sizeof(*d); i++) {
10084: 0591 addi a1,a1,4
10086: 0291 addi t0,t0,4
d[i] = s[i];
10088: fe62ae23 sw t1,-4(t0)
for (i = 0; i < n / sizeof(*d); i++) {
1008c: fe759ae3 bne a1,t2,10080 <cpy+0xc>
}
return dst;
}
10090: 8082 ret
ソースコードではベクトル型を使っていませんが、自動ベクトル化により256バイト(=64要素)ずつ処理され、vlw.v, vsw.v命令が使われるようになったことがわかります。
コメント一覧
- コメントはありません。
この記事にコメントする
2020年7月18日
北極送り
GitHubが北極にコードを保存する取り組み(私のソースコードが北極送りに? "GitHub" アカウントに謎のラベルが付与されたとの報告が多数 - やじうまの杜 - 窓の杜)をしているそうです。面白いこと考えますよね。
GitHub Arctic Code Vault Contributor
気づいたら自分のGitHubアカウントにもArctic Code Vault Contributorと出ていました。有名なOSSには関わってないし縁がないと思っていましたが、どうやらLinuxにコントリビュートしていたので出てきたっぽいです。いわれてみるとLinuxもGitHubにミラーされてました。
未来人は現代人を理解できるだろうか?
現代人をもってしても1000年前の文字の解読(例: ヒエログリフ、前3200年〜4世紀、19世紀頃に解読された)はとても苦労したこと、解読されていない古代文字がまだまだあることを考えれば、現代文字や文明を遺しても未来人が理解不能で終わってしまう可能性もあるわけです。
少なくとも未来文明は現代文明より遥か上の水準に発展していないと、仮に現代文字や文明を発見できても、真に理解するのは難しいでしょう。
こんなことを考えると、実はCode Vaultの取り組みは「地球の未来は今より進んでいるはず」という信頼や願望が前提になっていることが見て取れます。人類か、それ以外の生命体か、誰の手に渡るかわかりませんが、SF的なロマンがありますよね。
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2020 | > | ||||
| << | < | 07 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | - | - | 1 | 2 | 3 | 4 |
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 | - |
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:

管理者: Katsuhiro Suzuki(katsuhiro( a t )katsuster.net)
This is Simple Diary 1.0
Copyright(C) Katsuhiro Suzuki 2006-2023.
Powered by PHP 8.2.15.
using GD bundled (2.1.0 compatible)(png support.)